For customers outside Calgary, please call toll free
+1 (833) 290-6300 For customers outside Calgary, please call toll free
+1 (833) 290-6300
+1 (833) 290-6300 For customers outside Calgary, please call toll free
+1 (833) 290-6300
January 6, 2016
Up until recently plunger lift wells have been run on time. The well depth along with the arrival time is used to calculate the average velocity. This can be compared to a threshold to either generate an alarm or shut in the well.
This is not a very accurate measurement because two major assumptions are being made. Firstly, there is no certainty that the plunger is at the bottom of the well, and secondly, an assumption is made that the plunger is traveling at a consistent speed throughout the entire time it travels up the well. Plunger lift operators will tell you that they know the plunger velocity is not consistent during the rise of the plunger, they just can’t tell you exactly what the velocity is at surface. In many cases, the control system is set to optimize plungers to run slower to build in a safety factor in case the plunger accelerates at surface.
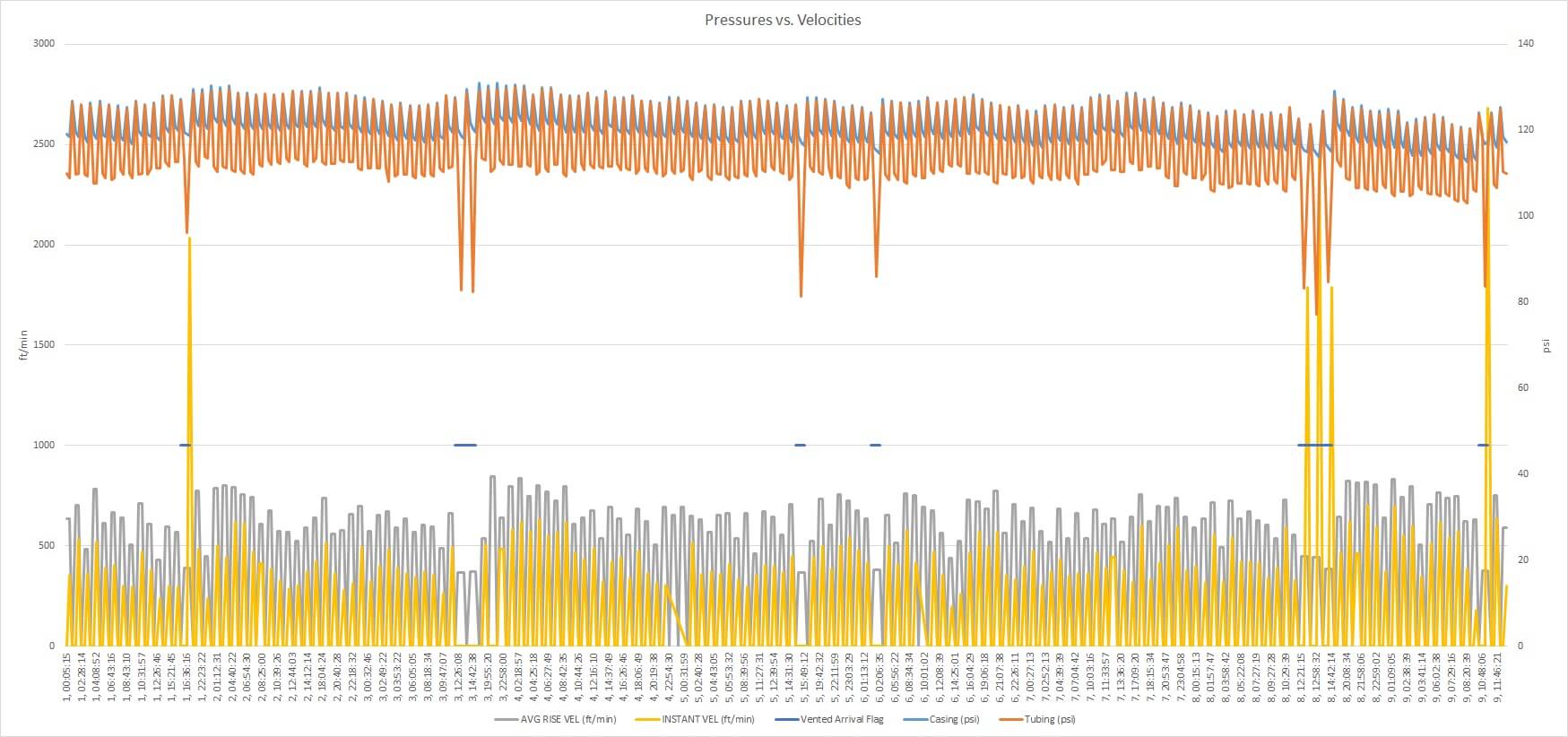
With the release of the SasquatchTM Plunger Velocity Sensor operators can finally see the surface velocity without having to make assumptions. So, what has been seen so far? The data confirms that the plunger rapidly accelerates at surface due to gas expansion in many cases. We also found cases where the surface velocity was well above or below the anticipated velocity. In these cases, the operator believed the plunger lift system was running safely and consistently because they were monitoring the average velocity.
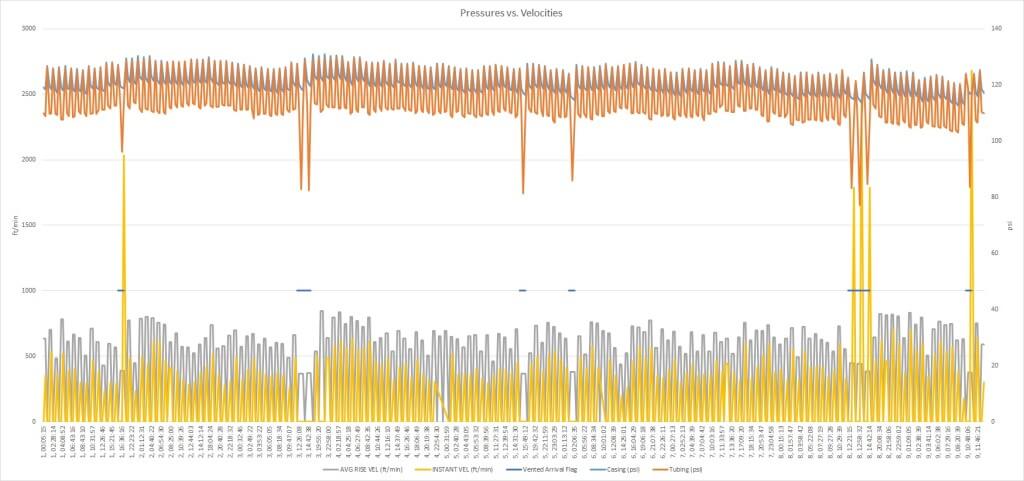
In the above example, the instantaneous surface velocity was typically slower than the average velocity because it was being slowed due to the hydrostatic brake by the fluid hitting the lubricator. Every so often though, the plunger does not arrive when expected. The control system tries to recover by venting. This longer duration of time causes the average velocity to drop when in fact the dip in line pressure causes a large spike in the surface velocity. In some cases the surface velocity is fast enough that it exceeded the maximum velocity, which is reported as an error code and was not graphed.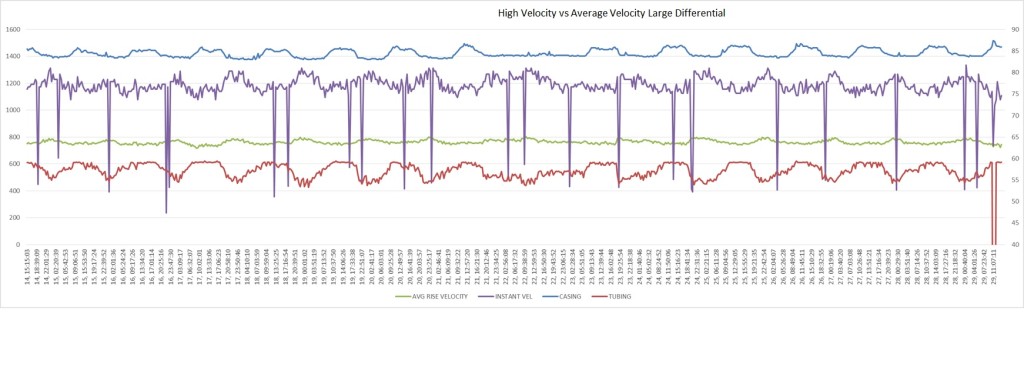 In this case, the surface velocity was routinely more than 50 per cent higher than the average velocity. On occasion, the surface velocity would be well below the average velocity. What was happening is that most plunger trips were coming up with very little fluid. On occasion a large amount of fluid was being produced, leading to a lower than expected surface velocity.
In this case, the surface velocity was routinely more than 50 per cent higher than the average velocity. On occasion, the surface velocity would be well below the average velocity. What was happening is that most plunger trips were coming up with very little fluid. On occasion a large amount of fluid was being produced, leading to a lower than expected surface velocity.
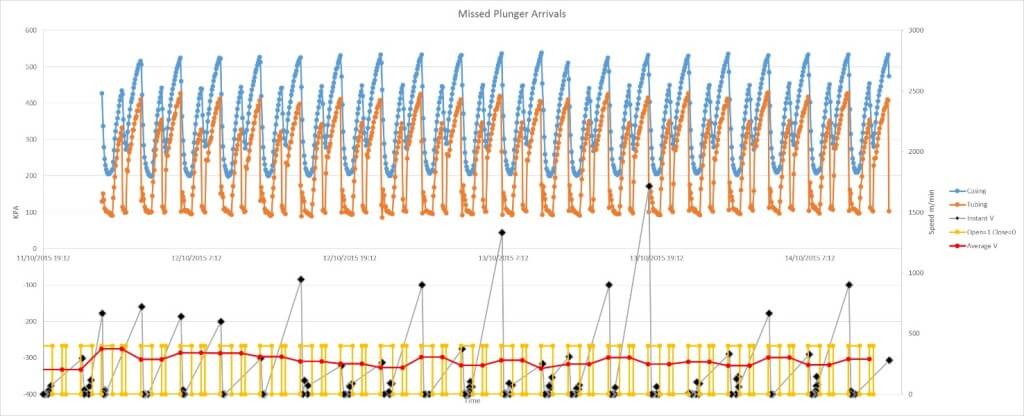
In our third case, a well in Canada appeared to be operating properly. When the Sasquatch was first installed, the plunger did not appear to be detected consistently. In reality the plunger was not making it to surface in time and was not being detected by the existing sensor. The controller would shut the well in longer in an attempt to build pressure. The result was an exceptionally fast plunger at surface the next cycle. Once again, the controller was seeing a slower average velocity and the operator was not aware of the problem.
The conclusion is that the surface velocity does not always track the average velocity and operators have to be careful what assumptions are being made. By monitoring surface velocity, we can learn how the system is performing and what impacts the spring at the top is actually taking. Using this information, we can start to see ways to optimize production and improve safety, whether manually adjusting system parameters or adopting an algorithm that uses the surface velocity to smooth out the cycles and automatically adjusts to maximize performance.



