(403) 290-6300
(403) 290-6300
For customers outside Calgary, please call toll free
+1 (833) 290-6300 For customers outside Calgary, please call toll free
+1 (833) 290-6300
+1 (833) 290-6300 For customers outside Calgary, please call toll free
+1 (833) 290-6300
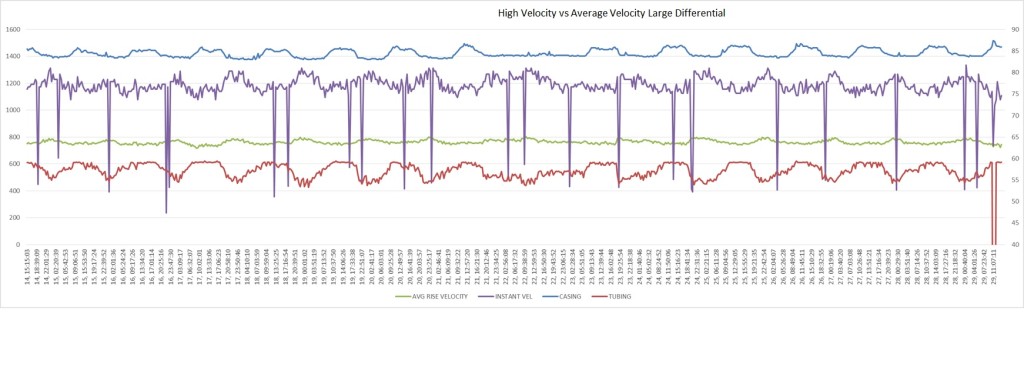 In this case, the surface velocity was routinely more than 50 per cent higher than the average velocity. On occasion, the surface velocity would be well below the average velocity. What was happening is that most plunger trips were coming up with very little fluid. On occasion a large amount of fluid was being produced, leading to a lower than expected surface velocity.
In this case, the surface velocity was routinely more than 50 per cent higher than the average velocity. On occasion, the surface velocity would be well below the average velocity. What was happening is that most plunger trips were coming up with very little fluid. On occasion a large amount of fluid was being produced, leading to a lower than expected surface velocity.